FILDEM a imaginé un nouveau concept de localisation qui combine réalité augmentée et géolocalisation indoor dont l’objectif est de fiabiliser la localisation spatiale des relevés et des mesures effectuées pour les besoins du démantèlement dans les installations en déconstruction d’EDF DP2D et de procéder à une préparation minutieuse en amont.
Un système de localisation dynamique à l’intérieur d’un bâtiment en milieu sévère est nécessaire pour aider une personne à s’y retrouver, en particulier lorsqu’elle explore le bâtiment pour la première fois. Dans un tel scénario, un outil de géolocalisation portable et de bonne précision s’avère être une aide très importante.
De tels outils sont utilisés dans de nombreux endroits, notamment pour les visites guidées dans un cadre industriel, les musées et les galeries d’art. La géolocalisation et la navigation à l’intérieur de ces environnements privés de GPS a été un problème difficile pour les chercheurs en robotique et en vision. Plusieurs méthodes de géolocalisation et de cartographie simultanées ont été utilisées pour l’environnement intérieur, notamment : l’utilisation de références locales intérieures c’est-à-dire les points de repère visuels, la géolocalisation par Wifi/Bluetooth et l’unité de mesure inertielle.
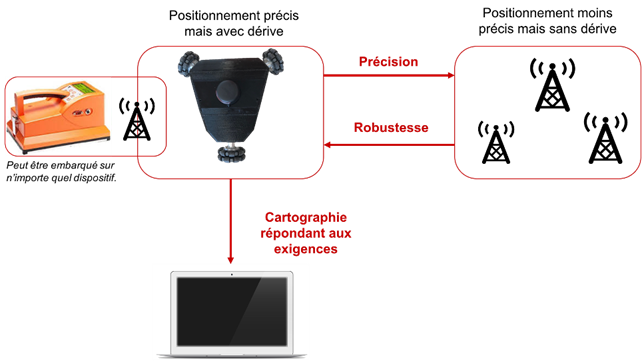
Les différents capteurs exploitent des caractéristiques uniques pour une tâche donnée. L’approche basée sur le Wifi/Bluetooth utilise l’intensité du signal reçu et les empreintes digitales des signaux pour localiser les points d’accès les plus calibrés, ce qui améliore la précision. Le positionnement basé sur l’unité de mesure inertielle utilise la combinaison des signaux de l’accéléromètre, du gyroscope et de la boussole pour la géolocalisation. Le gyroscope fournit une très bonne réponse dynamique en mesurant le changement d’orientation du dispositif, tandis que la boussole donne l’orientation du dispositif par rapport à la direction du Nord.
En plus des données de l’unité de mesure inertielle, les chercheurs en robotique ont également appliqué des techniques de détection de mouvement basées sur la vision et le laser pour la localisation et la cartographie simultanées. Cependant, l’applicabilité du capteur de vision pour la localisation et la cartographie simultanées est soumise à la puissance de calcul et à la durée de vie de la batterie disponibles dans l’appareil.
Dans ce contexte, FILDEM a imaginé un nouveau concept de localisation qui combine réalité augmentée et géolocalisation indoor dont l’objectif est de fiabiliser la localisation spatiale des relevés et des mesures effectuées pour les besoins du démantèlement dans les installations en déconstruction d’EDF DP2D et de procéder à une préparation minutieuse en amont.